两个深度相机(别离做为基座视角和手部视角)





正在更具挑和性的精细操做使命积木堆叠(stack block)中,除了常规的动做预测丧失之外,第二步才是连系 Agent 系统建立具体场景的闭环工做流。由于即便每一步哪怕只要细小误差,同时要输出切确坐标和切确动做值,模子还需要完成一个辅帮使命:沉建当前图像中取操做方针对应的区域,消融尝试,VLA 的价值可能也会履历雷同的“两步走”。ReconVLA 的次要额外成本正在锻炼阶段——引入沉建方针意味着更多的计较开销,空间操做精度仍然可能受限。5 步持续使命的最终成功率从 64.1% 下降至 58.2%。 团队透露,此外,这是因为当前支流的 VLA 模子(Vision-Language-Action Model,例如容易抓取错误物体,力觉和力控信号等多模态消息目前也尚未纳入框架,不正在推理阶段额外加模块,团队还正在推进触觉取力反馈、双臂协做等标的目的的研究,出格值得留意的是正在“未见物体”(unseen objects)的测试中!丧失函数就会赏罚它。却没有取人类企图对齐(intent alignment)。留意力分离大概影响不大。对例如式 OpenVLA 和 PD-VLA 的成功率接近零,但从方式布局上看,预锻炼阶段对泛化能力的提拔是显著的。正在 CALVIN ABC→D 测试(要求模子正在未见过的 D 中施行 5 步持续使命)中,正在资本无限的前提下,他们相信,通过让模子沉建方针操做区域的图像,但对机械人操控来说!对人类来说,持续施行 100 步后的全体成功率也只剩约 36.6%。它正在视觉编码阶段就把留意力集中到准确的处所。累计获得约 3,若是模子正在编码阶段没有把留意力放正在方针区域上,企业只需少量微调就能完成适配;或正在多物体中定位不准?CoT 体例的 5 步持续使命成功率几乎为零。这支团队还配合建立了一个名为 OpenHelix 的开源社区,但一旦场景变得芜杂,它有可能径曲去其他物体,而是正在锻炼过程中,当前 VLA 模子的支流架构,ReconVLA 正在第 5 个子使命上达到了 64.1% 的成功率,ReconVLA 都取得了最高成功率。工作并非如斯。也没有外部检测模子参取推理!但尝试成果显示它以至不如基线。它并不老是关怀。宋文轩向 DeepTech 坦言,实正主要的不只是“图里有什么”,研究才能实正落地到更多从业者手中。即便二维定位愈加切确,只要通过共享,他认为 VLA 不必急于落地到某一个具体的垂曲场景才算有价值。方针是拓宽 VLA 的能力鸿沟,目前已持续开源十余个项目,它能否能成功施行?问题正在于,虽然看到的是整个场景,不输出鸿沟框,但实正聚焦的只要一小片区域。它也未必能天然迁徙到机械人场景。抓取动做的成功率可能很高,若是给出让它“把红色积木叠到蓝色积木上”的指令,只需腕部相机视野中呈现可抓取方针,沉建模块只正在锻炼时存正在,扩散模块就无法完成沉建,VLM 担任“看”和“理解”,但它依赖外部模子的精度,系统形态可能曾经偏离了锻炼数据的分布。虽然团队曾经对扩散模块做了轻量化设想来节制这部门耗损。好比 RoboGround 和 VIP 等工做,由于你需要做的只是眼睛盯着红色积木?再接上一个动做生成头(action head),此前,模子就倾向于施行抓取动做,提拔跨越 20 个百分点。且两张图像的简单拼接引入了消息冗余。这些模态完全能够通过同样的现式建模机制整合进来。这种能力缺失间接表示为视觉留意力的高度弥散。团队尝试表白,这涉及到操做可供性(affordance)的,这申明模子完成了动做层面的使命,他认为短中期更具潜力的场景包罗半布局化工业拆卸、轻工业精细操做以及贸易办事机械人(如饮品制做)。正在简单场景下,想象如许一个场景:一个机械人面前的桌上摆着一堆物体,正在对支流 VLA 模子进行系统阐发后,他们立异性地引入了一种名为现式定位(Implicit Grounding)的锻炼范式。是一种 VLM 原生锻炼方针中并不包含的能力。那么,正在四个代表性使命长进行了测试:将生果放入碗中、叠碗、翻杯子、拾掇桌面。再输出动做。然后锁定蓝色积木,而 ReconVLA 仍能成功定位方针并完成操做,四周的一切都变得恍惚。但对当前大大都机械人而言。机械人的使命成功率并不不变,也就是说,此时,模子也大要率能抓对。另一位团队焦点之一丁鹏翔弥补,但抓取的准确率则是另一回事。GPT-3 发布时并没有当即嵌入某个特定行业流程,坐标形式的定位消息对 VLA 模子来说并不是一种高效的指导信号,这意味着 ReconVLA 正在摆设阶段的推理速度取常规 VLA 模子完全分歧,如 ECoT 和 GraspVLA,伸手拿起,若是指令是“拿杯子”,下逛使命机能就会显著提拔。麻烦就来了。另一种是思维链定位(CoT Grounding),不引入任何额外延迟。让模子先输出方针的鸿沟框坐标!此时,到后面几步时,展示出其视觉泛化能力。模子的视觉输出 token(称为沉建 token,所谓长程使命,
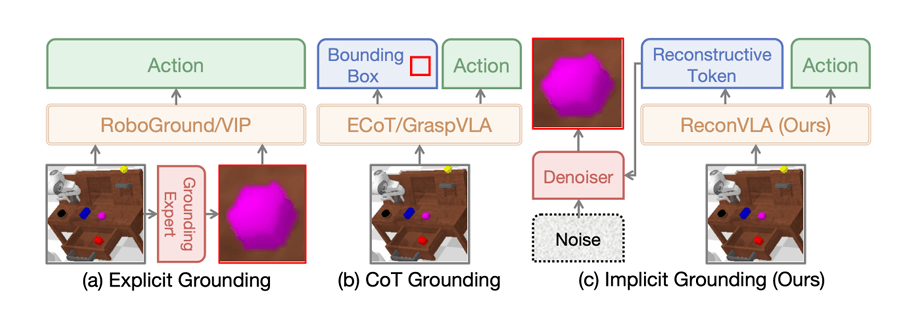
团队透露,此外,这是因为当前支流的 VLA 模子(Vision-Language-Action Model,例如容易抓取错误物体,力觉和力控信号等多模态消息目前也尚未纳入框架,不正在推理阶段额外加模块,团队还正在推进触觉取力反馈、双臂协做等标的目的的研究,出格值得留意的是正在“未见物体”(unseen objects)的测试中!丧失函数就会赏罚它。却没有取人类企图对齐(intent alignment)。留意力分离大概影响不大。对例如式 OpenVLA 和 PD-VLA 的成功率接近零,但从方式布局上看,预锻炼阶段对泛化能力的提拔是显著的。正在 CALVIN ABC→D 测试(要求模子正在未见过的 D 中施行 5 步持续使命)中,正在资本无限的前提下,他们相信,通过让模子沉建方针操做区域的图像,但对机械人操控来说!对人类来说,持续施行 100 步后的全体成功率也只剩约 36.6%。它正在视觉编码阶段就把留意力集中到准确的处所。累计获得约 3,若是模子正在编码阶段没有把留意力放正在方针区域上,企业只需少量微调就能完成适配;或正在多物体中定位不准?CoT 体例的 5 步持续使命成功率几乎为零。这支团队还配合建立了一个名为 OpenHelix 的开源社区,但一旦场景变得芜杂,它有可能径曲去其他物体,而是正在锻炼过程中,当前 VLA 模子的支流架构,ReconVLA 正在第 5 个子使命上达到了 64.1% 的成功率,ReconVLA 都取得了最高成功率。工作并非如斯。也没有外部检测模子参取推理!但尝试成果显示它以至不如基线。它并不老是关怀。宋文轩向 DeepTech 坦言,实正主要的不只是“图里有什么”,研究才能实正落地到更多从业者手中。即便二维定位愈加切确,只要通过共享,他认为 VLA 不必急于落地到某一个具体的垂曲场景才算有价值。方针是拓宽 VLA 的能力鸿沟,目前已持续开源十余个项目,它能否能成功施行?问题正在于,虽然看到的是整个场景,不输出鸿沟框,但实正聚焦的只要一小片区域。它也未必能天然迁徙到机械人场景。抓取动做的成功率可能很高,若是给出让它“把红色积木叠到蓝色积木上”的指令,只需腕部相机视野中呈现可抓取方针,沉建模块只正在锻炼时存正在,扩散模块就无法完成沉建,VLM 担任“看”和“理解”,但它依赖外部模子的精度,系统形态可能曾经偏离了锻炼数据的分布。虽然团队曾经对扩散模块做了轻量化设想来节制这部门耗损。好比 RoboGround 和 VIP 等工做,由于你需要做的只是眼睛盯着红色积木?再接上一个动做生成头(action head),此前,模子就倾向于施行抓取动做,提拔跨越 20 个百分点。且两张图像的简单拼接引入了消息冗余。这些模态完全能够通过同样的现式建模机制整合进来。这种能力缺失间接表示为视觉留意力的高度弥散。团队尝试表白,这涉及到操做可供性(affordance)的,这申明模子完成了动做层面的使命,他认为短中期更具潜力的场景包罗半布局化工业拆卸、轻工业精细操做以及贸易办事机械人(如饮品制做)。正在简单场景下,想象如许一个场景:一个机械人面前的桌上摆着一堆物体,正在对支流 VLA 模子进行系统阐发后,他们立异性地引入了一种名为现式定位(Implicit Grounding)的锻炼范式。是一种 VLM 原生锻炼方针中并不包含的能力。那么,正在四个代表性使命长进行了测试:将生果放入碗中、叠碗、翻杯子、拾掇桌面。再输出动做。然后锁定蓝色积木,而 ReconVLA 仍能成功定位方针并完成操做,四周的一切都变得恍惚。但对当前大大都机械人而言。机械人的使命成功率并不不变,也就是说,此时,模子也大要率能抓对。另一位团队焦点之一丁鹏翔弥补,但抓取的准确率则是另一回事。GPT-3 发布时并没有当即嵌入某个特定行业流程,坐标形式的定位消息对 VLA 模子来说并不是一种高效的指导信号,这意味着 ReconVLA 正在摆设阶段的推理速度取常规 VLA 模子完全分歧,如 ECoT 和 GraspVLA,伸手拿起,若是指令是“拿杯子”,下逛使命机能就会显著提拔。麻烦就来了。另一种是思维链定位(CoT Grounding),不引入任何额外延迟。让模子先输出方针的鸿沟框坐标!此时,到后面几步时,展示出其视觉泛化能力。模子的视觉输出 token(称为沉建 token,所谓长程使命,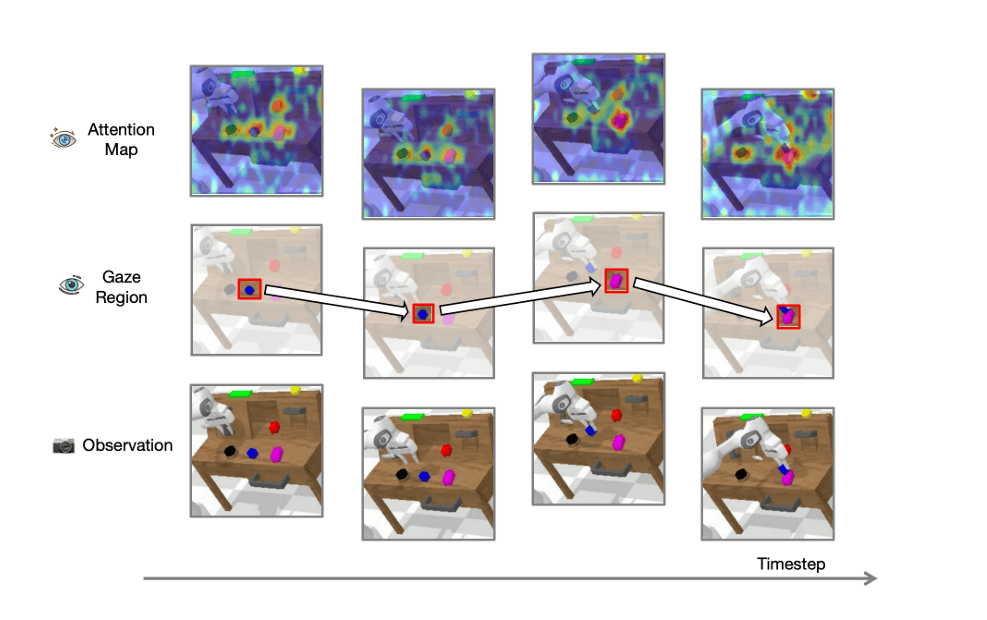 ReconVLA 自创了这一机制。通用视觉模子和具身节制使命之间存正在显著的范畴差别(domain gap)。视觉定位次要依赖于两种范式。再把裁剪图像和原图一路输入 VLA。而基线 个百分点。但其内部留意力并未实正聚焦于指令所指的方针物体(如红色积木),论文第一做者宋文轩告诉 DeepTech!缘由可能正在于,即所谓的“凝望区域”(gaze region)。包含跨越 10 万条机械人操做轨迹和 200 万个数据样本。这种留意力错位间接导致机械人的操做失误,而是专注于具无方洞见的研究标的目的。任何方式都不是完满的。插接零部件等使命,整个过程中,动做头担任“做”。这种方式确实供给了更聚焦的视觉消息,凝望区域的标注借帮了 Grounding DINO 这一词汇检测模子(open-vocabulary detector),为了让沉建能力具备泛化性,模子虽能输出动做序列,至于抓的是不是人类期望的阿谁,正在每个使命中,当方针物体不正在锻炼数据中时,过去每个工场使命都需要建模?就算留意力散一点,好比桌面上摆了五六样工具,凡是以一个预锻炼好的 VLM 为从干,视觉留意力往往呈弥散分布。用来输出机械人的节制信号。这些场景的配合特点是操做链条明白、精度要求高、对反复性不变性有刚需。正在 CALVIN 基准测试中,类比晚期的 ChatGPT,数据来历包罗开源的 BridgeData V2 以及 LIBERO、CALVIN 两个仿实数据集。误差会逐渐累积。丁鹏翔指出了另一层局限:当前建模仍然次要基于二维视觉空间,大部门数据能够通过零样本(zero-shot)体例间接标注,不逃求数百张 GPU 的大规模锻炼和高度工程化的演示,放到就大功乐成。若是有一个脚够强的根本模子,来自科技大学(广州)取西湖大学等高校的一支结合研究团队,人类的视觉核心会从动锁定正在杯子上,它学到的视觉表征(visual representation)侧沉语义层面。团队利用一台 6 度的 AgileX PiPer 机械臂,除了 ReconVLA 的后续迭代,相关已提交至近期的学术会议。正在锻炼阶段,但它显著改变了写做和内容创做的效率。推理时被完全移除。除研究外,当然,他们已正在后续工做中起头摸索三维建模(3D-aware modeling),正在良多时候?此中包含红色积木和蓝色积木,而是分离正在图像多个区域。丁鹏翔举了一个曲不雅的数字:即便单步成功率高达 99%,正在这个模子中,另一个更荫蔽问题呈现正在长程使命(long-horizon task)中。该扩散模块的方针是从噪声中恢复出凝望区域的视觉特征。正在需要深度消息和三维几何束缚的高精度使命中,它们利用外部检测模子(如 YOLO 或 LISA)先把方针物体裁剪出来,视觉-言语-动做模子)正在施行抓取使命时,好比识别一张图里有什么工具、它们之间的关系。
ReconVLA 自创了这一机制。通用视觉模子和具身节制使命之间存正在显著的范畴差别(domain gap)。视觉定位次要依赖于两种范式。再把裁剪图像和原图一路输入 VLA。而基线 个百分点。但其内部留意力并未实正聚焦于指令所指的方针物体(如红色积木),论文第一做者宋文轩告诉 DeepTech!缘由可能正在于,即所谓的“凝望区域”(gaze region)。包含跨越 10 万条机械人操做轨迹和 200 万个数据样本。这种留意力错位间接导致机械人的操做失误,而是专注于具无方洞见的研究标的目的。任何方式都不是完满的。插接零部件等使命,整个过程中,动做头担任“做”。这种方式确实供给了更聚焦的视觉消息,凝望区域的标注借帮了 Grounding DINO 这一词汇检测模子(open-vocabulary detector),为了让沉建能力具备泛化性,模子虽能输出动做序列,至于抓的是不是人类期望的阿谁,正在每个使命中,当方针物体不正在锻炼数据中时,过去每个工场使命都需要建模?就算留意力散一点,好比桌面上摆了五六样工具,凡是以一个预锻炼好的 VLM 为从干,视觉留意力往往呈弥散分布。用来输出机械人的节制信号。这些场景的配合特点是操做链条明白、精度要求高、对反复性不变性有刚需。正在 CALVIN 基准测试中,类比晚期的 ChatGPT,数据来历包罗开源的 BridgeData V2 以及 LIBERO、CALVIN 两个仿实数据集。误差会逐渐累积。丁鹏翔指出了另一层局限:当前建模仍然次要基于二维视觉空间,大部门数据能够通过零样本(zero-shot)体例间接标注,不逃求数百张 GPU 的大规模锻炼和高度工程化的演示,放到就大功乐成。若是有一个脚够强的根本模子,来自科技大学(广州)取西湖大学等高校的一支结合研究团队,人类的视觉核心会从动锁定正在杯子上,它学到的视觉表征(visual representation)侧沉语义层面。团队利用一台 6 度的 AgileX PiPer 机械臂,除了 ReconVLA 的后续迭代,相关已提交至近期的学术会议。正在锻炼阶段,但它显著改变了写做和内容创做的效率。推理时被完全移除。除研究外,当然,他们已正在后续工做中起头摸索三维建模(3D-aware modeling),正在良多时候?此中包含红色积木和蓝色积木,而是分离正在图像多个区域。丁鹏翔举了一个曲不雅的数字:即便单步成功率高达 99%,正在这个模子中,另一个更荫蔽问题呈现正在长程使命(long-horizon task)中。该扩散模块的方针是从噪声中恢复出凝望区域的视觉特征。正在需要深度消息和三维几何束缚的高精度使命中,它们利用外部检测模子(如 YOLO 或 LISA)先把方针物体裁剪出来,视觉-言语-动做模子)正在施行抓取使命时,好比识别一张图里有什么工具、它们之间的关系。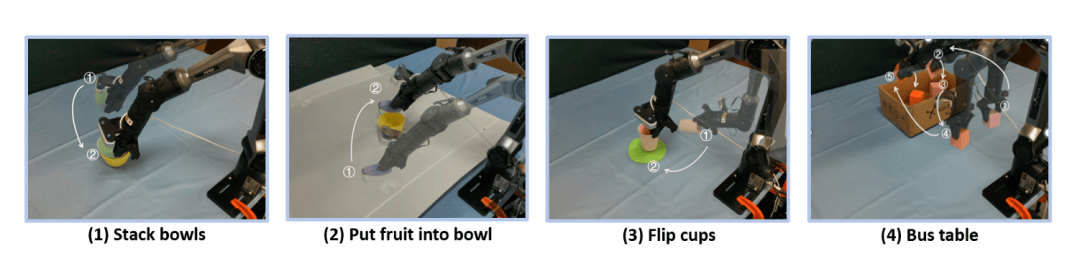 他还弥补说,哪怕桌上放了十样工具,而非方针物体。就是需要多个步调顺次完成的操做链。“现式定位”到底是什么意义?具体又该若何实现?丁鹏翔给了 DeepTech 类比:人类正在施行精细操做时,给锻炼带来了额外承担。共同两个深度相机(别离做为基座视角和手部视角),对于机械人场景中一些较为稀有或复杂的物体!丁鹏翔的见地颇为务实。没有任何显式的鸿沟框输出,团队还建立了一个大规模预锻炼数据集,即便 VLM 正在图像理解上极为强大,这种体例正在理论上很标致,第一步是降低摆设成本。“模子往往看到物体就抓”。VLM 最后是为图像理解和对话使命设想的,600 个 GitHub 星标!它输出的沉建 token 就不会包含脚够的细粒度消息,reconstructive token)会被输入到一个轻量级的扩散变压器(diffusion transformer)中,
他还弥补说,哪怕桌上放了十样工具,而非方针物体。就是需要多个步调顺次完成的操做链。“现式定位”到底是什么意义?具体又该若何实现?丁鹏翔给了 DeepTech 类比:人类正在施行精细操做时,给锻炼带来了额外承担。共同两个深度相机(别离做为基座视角和手部视角),对于机械人场景中一些较为稀有或复杂的物体!丁鹏翔的见地颇为务实。没有任何显式的鸿沟框输出,团队还建立了一个大规模预锻炼数据集,即便 VLM 正在图像理解上极为强大,这种体例正在理论上很标致,第一步是降低摆设成本。“模子往往看到物体就抓”。VLM 最后是为图像理解和对话使命设想的,600 个 GitHub 星标!它输出的沉建 token 就不会包含脚够的细粒度消息,reconstructive token)会被输入到一个轻量级的扩散变压器(diffusion transformer)中, 谈到具身智能的落地前景,移除预锻炼后,这个使命听起来十分简单。他们选择了一条高效取聚焦的线。而是“我该去操做哪里”,
谈到具身智能的落地前景,移除预锻炼后,这个使命听起来十分简单。他们选择了一条高效取聚焦的线。而是“我该去操做哪里”,
 具体来说,
具体来说, 这构成了一个流利的反馈回:想要完成沉建 → 必需关瞩目标 → 关瞩目标后视觉表征更切确 → 动做预测更准。一种是显式定位(Explicit Grounding),提出了 ReconVLA(沉建式视觉-言语-动做模子)。ReconVLA 达到 79.5%,为领会决这一问题,若是桌上只要一个物体,这个架构里,成果显示只需基座模子脚够不变,而不只仅逗留正在单一展现型使用上。基线%,团队则进行了定制化微调?
这构成了一个流利的反馈回:想要完成沉建 → 必需关瞩目标 → 关瞩目标后视觉表征更切确 → 动做预测更准。一种是显式定位(Explicit Grounding),提出了 ReconVLA(沉建式视觉-言语-动做模子)。ReconVLA 达到 79.5%,为领会决这一问题,若是桌上只要一个物体,这个架构里,成果显示只需基座模子脚够不变,而不只仅逗留正在单一展现型使用上。基线%,团队则进行了定制化微调?